
6.4 Konfiguration
Konfigurationszone
Wenn Ihr System zum ersten Mal konfiguriert wird, folgen Sie bitte den ersten Schritten:
Sie sind jetzt bereit, Ihre Fahrzeugerkennungszone(n) zu konfigurieren.
Durch das Lesen dieses Absatzes werden Sie in der Lage sein:
Die zu konfigurierende Kamera auszuwählen,
Einen Fahrzeugerkennungsbereich zu erstellen,
Die Größe, die Position, die Ausrichtung des Erkennungsbereichs zu konfigurieren,
Einen Fahrzeugerkennungsbereich zu löschen,
Verschiedene Optionen für einen Erkennungsbereich auszuwählen, wie Empfindlichkeit der Erkennung und Auslösen von Ausgängen im Falle einer Erkennung.
Schritt für Schritt zur Konfiguration des Erkennungsbereichs
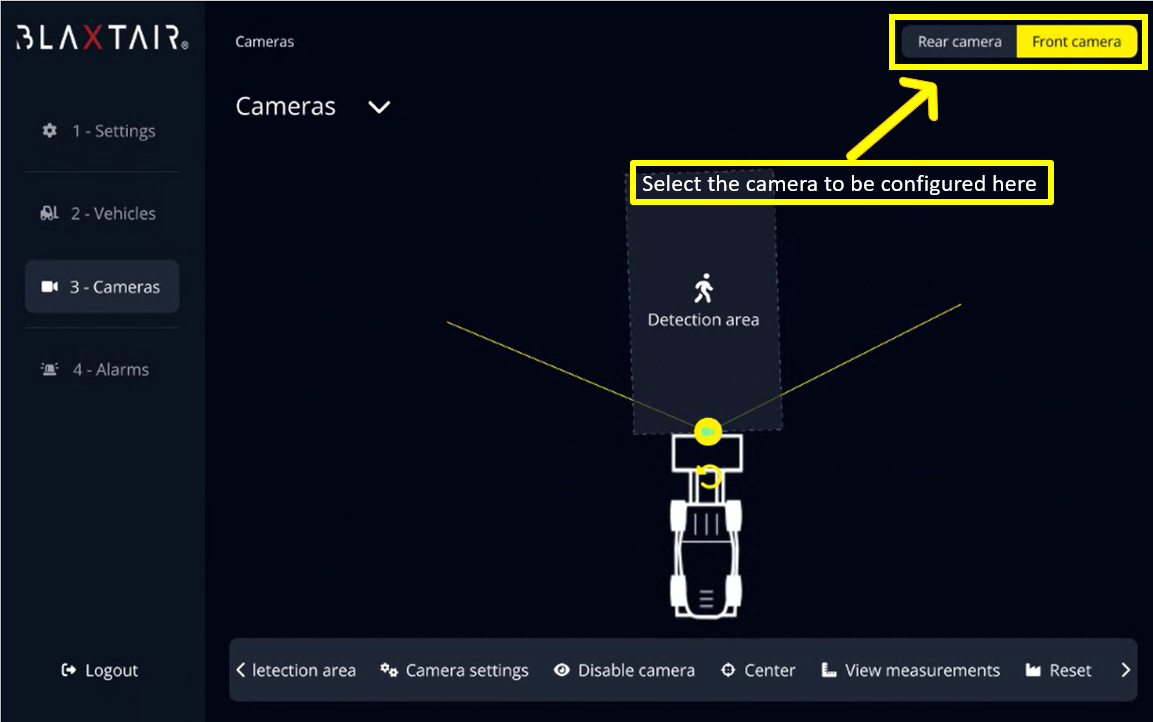
1️⃣ WÄHLEN SIE DIE ZU KONFIGURIERENDE KAMERA AUS
Wählen Sie die zu konfigurierende Kamera aus, indem Sie auf die Schaltflächen in der oberen rechten Ecke klicken:
„Rückkamera“ entspricht der Kamera, die am hinteren Teil des Fahrzeugs installiert ist
„Frontkamera“ entspricht der Kamera, die am vorderen Teil des Fahrzeugs installiert ist
WARNUNG
Eine Meldung „Kamera deaktiviert“ kann auf dem Bildschirm erscheinen, wenn die ausgewählte Kamera nicht mit dem Fahrzeug verbunden oder vom Smart Display nicht erkannt wird.
In diesem Fall gehen Sie zurück in den LIVE-MODUS und greifen Sie auf den [KAMERA-EINSTELLUNGEN] Modus zu, um die FRONT- oder RÜCKKAMERA zu definieren. Weitere Details im Absatz [KAMERA-EINSTELLUNGEN].
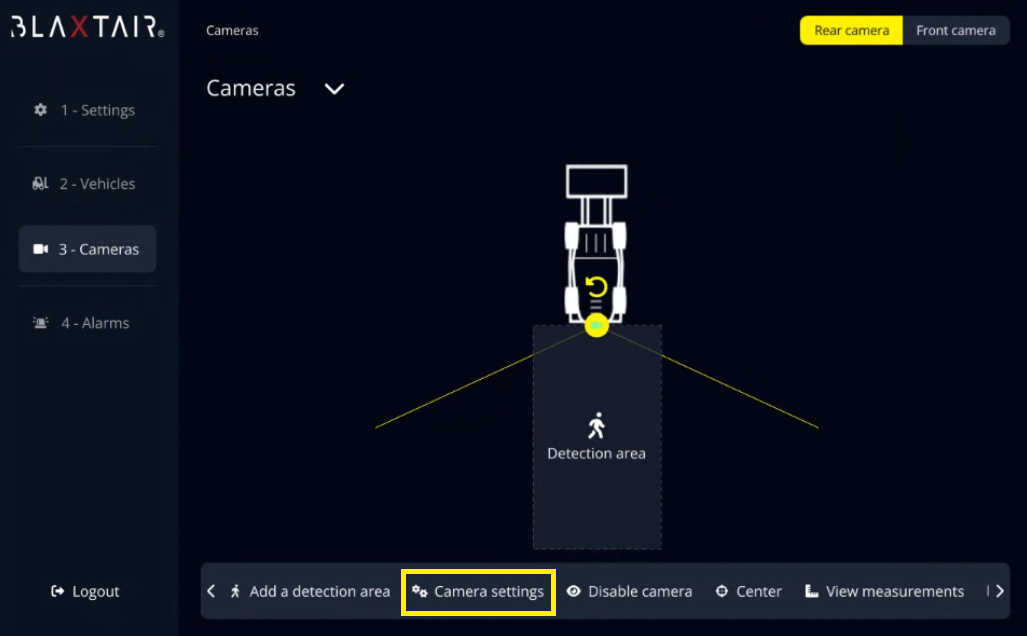
2️⃣ KONFIGURATION DER KAMERA-EINSTELLUNGEN
Wählen Sie die Registerkarte „Kameraeinstellungen“, um die Installationsparameter der Kamera zu konfigurieren.
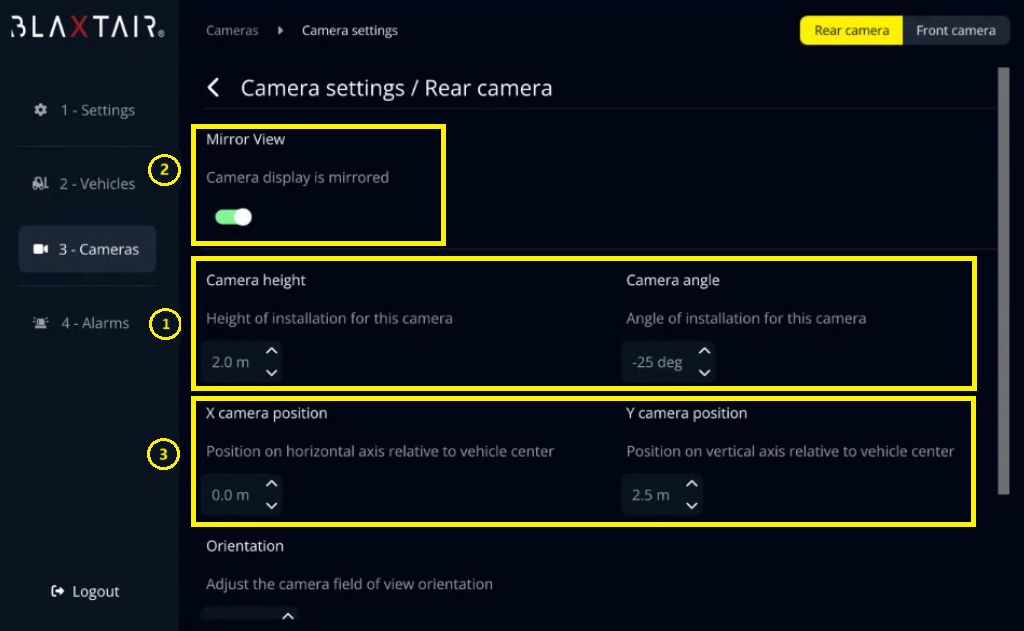
Sobald Sie in den Kameraeinstellungen sind:
müssen Sie die Höhe der Kamera und die Parameter des Kameraneigungswinkels sorgfältig messen.
ES IST VERPFLICHTEND, SO VIEL WIE MÖGLICH DIE ECHTE HÖHE UND DEN WINKEL ZU RESPEKTIEREN, UM GUTE LEISTUNG ZU ERZIELEN:
Fall A: niedrigere Alarmrate als in der Realität
Wenn der tatsächliche Neigungswinkel der Kamera höher ist als der konfigurierte Neigungswinkel
wird das Fahrzeug weiter entfernt lokalisiert als in der Realität
könnte das System einige Alarme aufgrund der Überschätzung der Lokalisierung verpassen
Fall B: Höhere Alarmrate als in der Realität
Wenn der tatsächliche Neigungswinkel der Kamera niedriger ist als der konfigurierte Neigungswinkel
wird das Fahrzeug näher lokalisiert als in der Realität
könnte das System einige Alarme für entfernte Fahrzeuge aufgrund der Unterschätzung der Lokalisierung auslösen
Sie können wählen, die Kamerasicht zu spiegeln → meistens für die Rückkameraansicht
Sie können die Kameraposition im Vergleich zum Fahrzeugzentrum verschieben (auch manuell möglich, siehe unten Video)
Sie können den Kamerawinkel im Vergleich zum Fahrzeugzentrum verschieben (auch manuell möglich, siehe unten Video)
Der Kamerasichtbereich beträgt 130°. Er wird durch die beiden gelben geraden Linien dargestellt, die am Kamerabild auf dem Display beginnen.
Dieser Parameter ist NICHT einstellbar.
Sobald dies erledigt ist und Sie sicher sind, dass die Höhe der Kamera und der Neigungswinkel den Installationsanforderungen entsprechen, können Sie zu „3-Kameras“ zurückkehren.
3️⃣ EINEN ERKENNUNGSBEREICH ERSTELLEN UND LÖSCHEN
Das folgende Video erklärt, wie man einen Erkennungsbereich erstellt und löscht.
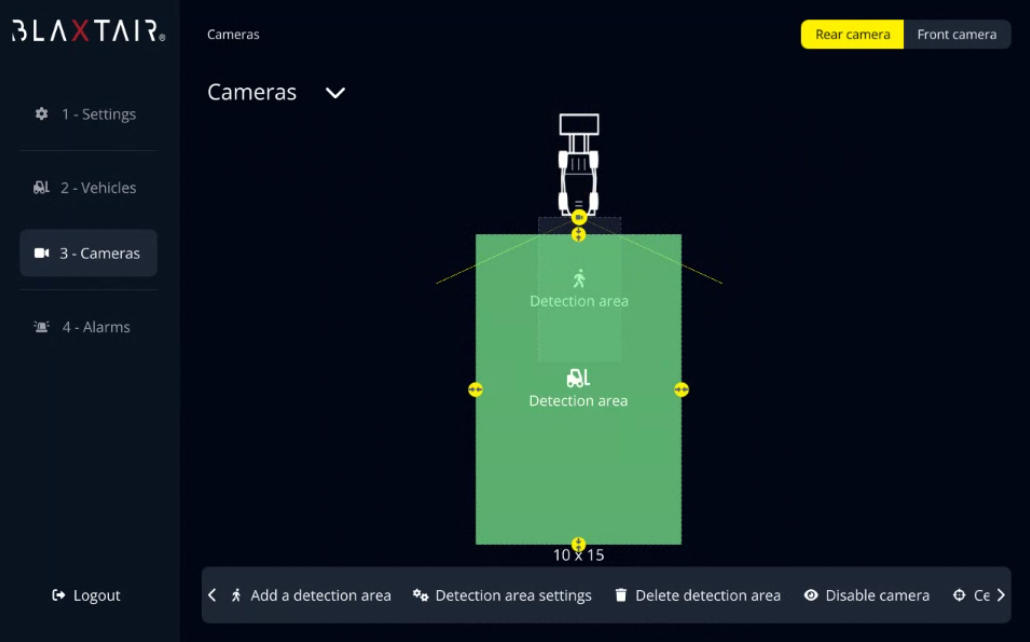
Verwenden Sie das Schiebemenü am unteren Bildschirmrand, um einen Erkennungsbereich zu erstellen oder zu löschen.
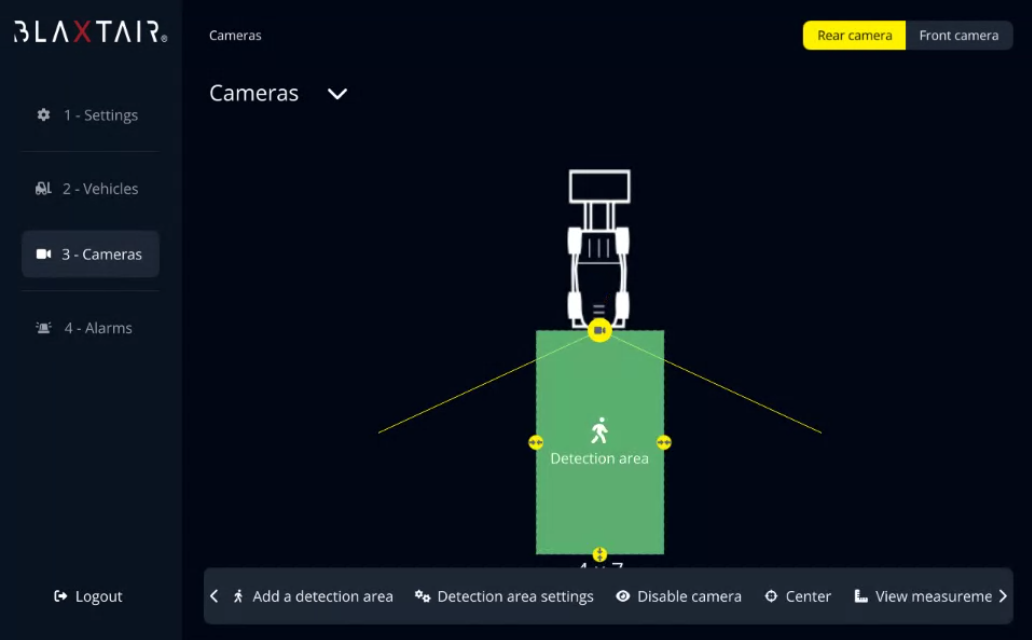
Einen Erkennungsbereich hinzufügen → Klicken Sie auf „Einen Erkennungsbereich hinzufügen“
Ein Erkennungsbereich erscheint auf dem Bildschirm. Der Bereich ist grün. Das bedeutet, dass dieser Bereich ausgewählt und bereit zur Konfiguration ist.
Erkennungsbereich löschen
Klicken Sie auf den zu löschenden Erkennungsbereich
Klicken Sie auf „Erkennungsbereich löschen“
Der ausgewählte Erkennungsbereich verschwindet vom Bildschirm.
4️⃣ KONFIGURATION DER „FAHRZEUG“-ZONENEINSTELLUNG
Um eine Zone im Fahrzeugerkennungsmodus festzulegen, klicken Sie einfach auf die Zone, die Sie konfigurieren möchten.
Sobald die Zone ausgewählt ist, wird der „Erkennungsbereich“ grün, wie oben dargestellt.
Um mit den Zonen-Einstellungen fortzufahren, müssen Sie auf „Einstellungen des Erkennungsbereichs“ klicken.

Sie gelangen zur Einstellungsseite und können Folgendes einrichten:
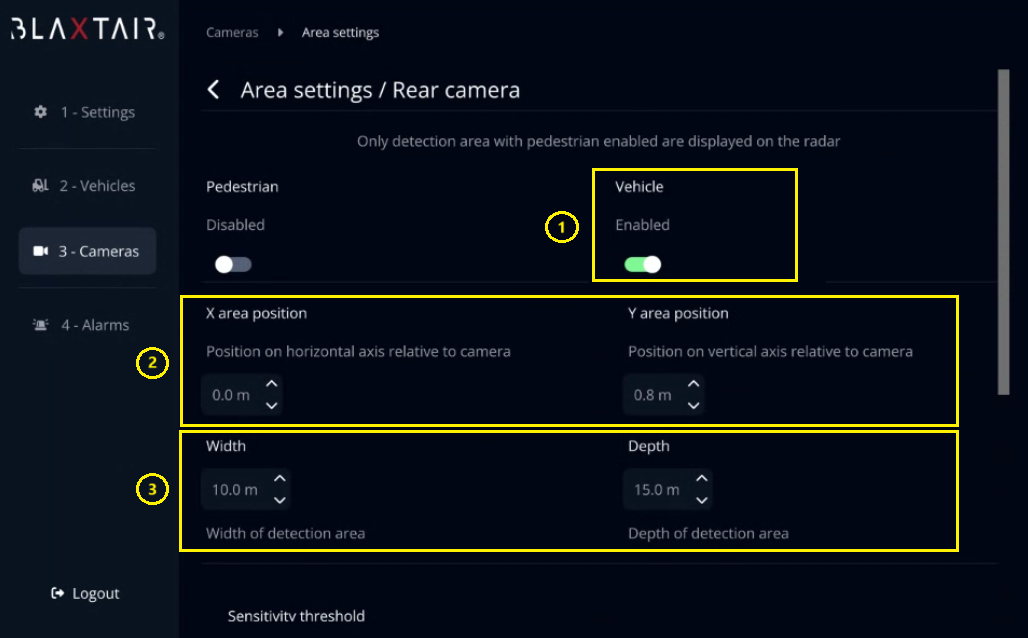
Die Art(en) der Erkennung, die Sie in der ausgewählten Zone wünschen (nur Fahrzeug, nur Fußgänger oder beides)
Die Position des Erkennungsbereichs relativ zur Kamera (auch manuell möglich, siehe unten „Größe und Position anpassen“ Video)
Die Größe (Breite und Tiefe) der Zone (auch manuell möglich, siehe unten „Größe und Position anpassen“ Video)
Sobald dies erledigt ist und Sie einen Fahrzeugerkennungsbereich erstellt haben, können Sie zurück zu „3-Kameras“ gehen. Sie werden, wie unten dargestellt, einen Fahrzeug-„Erkennungsbereich“ haben.
5️⃣ EMPFINDLICHKEIT UND AUSGÄNGE ANPASSEN
Die Empfindlichkeitsfunktion ermöglicht es, die Empfindlichkeit der Erkennung an den Typ der Baustelle und die Ereignisse anzupassen. Beispielsweise könnte in einem Bereich, in dem die Anzahl der „nicht relevanten Alarme“ hoch ist, eine mittlere oder niedrige Empfindlichkeit eine bessere Erkennungsrate bieten.
Die Ausgangsfunktion ermöglicht es, festzulegen, welcher Ausgang ausgelöst werden soll, wenn es eine Erkennung im ausgewählten Bereich gibt. Diese Funktion ist notwendig für die Installation einer Option wie LED-Buzzer, Blitzlicht oder Verlangsamung.
Klicken Sie auf die Schaltfläche „Einstellungen des Erkennungsbereichs“ im unteren Menü.
Wählen Sie die gewünschte Empfindlichkeit aus
Niedrig könnte zu verpassten Ereignissen führen
Hoch könnte zu nicht relevanten Alarmen führen
Aktivieren/deaktivieren Sie das Auslösen des Ausgangs mit dem Schieberegler. Wenn die Funktion EIN ist, wählen Sie den AUSGANG aus, der je nach Ihrer Installation ausgelöst werden soll. Weitere Details finden Sie im Absatz 3.6 AUSGANGSVERWALTUNG Punkt 5 - Bereiche.
Es wird empfohlen, die „Mittlere“ Empfindlichkeit als ersten Ansatz beizubehalten.
Um alle Änderungen zu speichern, klicken Sie auf Speichern/Beenden.